Note: The below provides an overview of the deployment, recovery, and data offload processes.
More specific instructions and field notes will be added in the near future.
Deployment
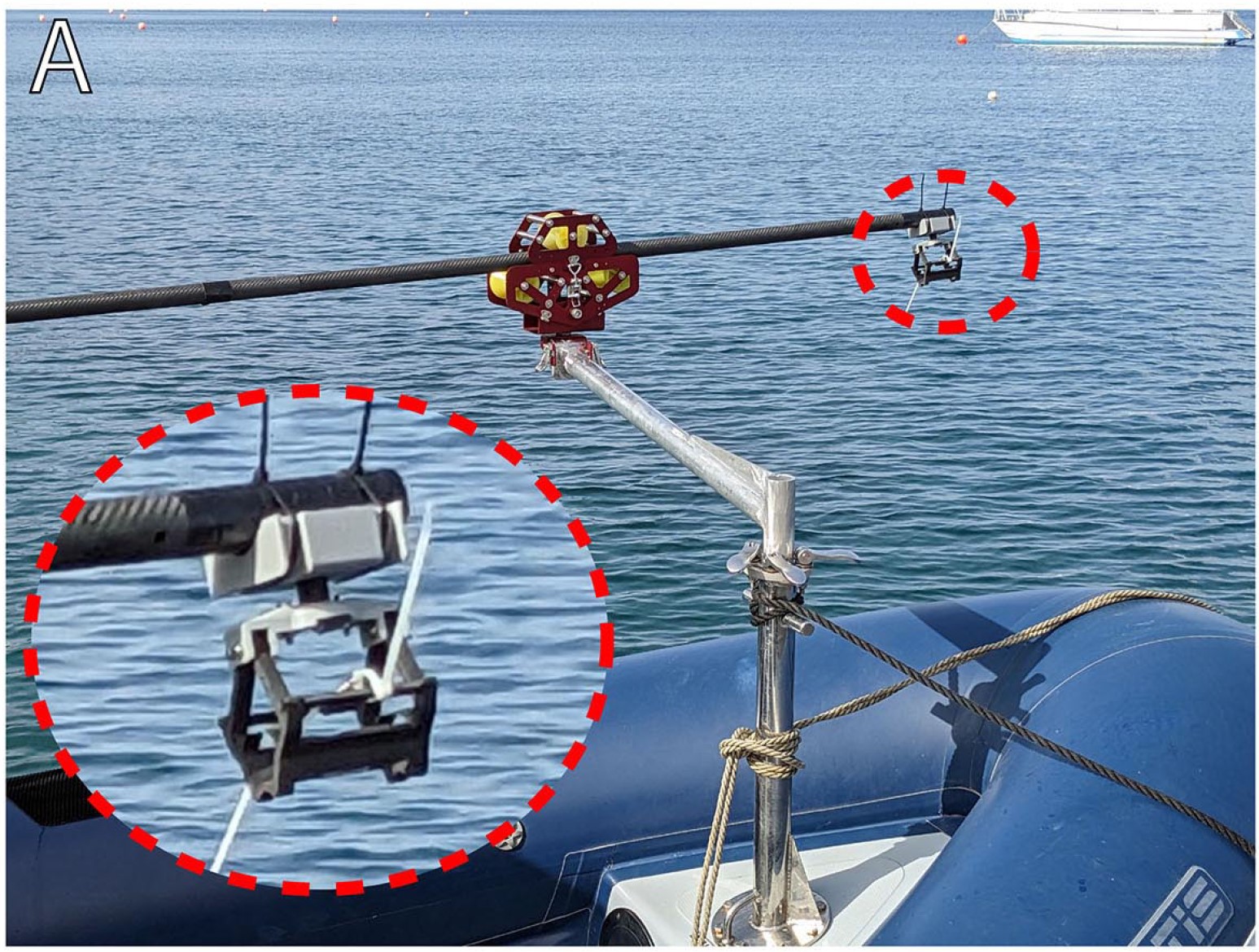
The tag has been deployed in two ways. The first method is the standard approach of using
a long pole from a boat, as shown in Figure 6A. A human operator uses a bistable clamping
mechanism to hold the tag at the end of a long pole. The boat approaches close to the whale, at
which point the operator places the tag onto the whale’s dorsal side, avoiding the blowhole and
dorsal fin. The deployment triggers the bistable clamp to passively release the tag and allow it
to remain adhered to the whale.
The second deployment method is drone-based tagging [54], as shown in Figure 6B. While our
tag is suitable for use in drone-based passive tag drop systems [19], we have taken the approach
of using an inexpensive and rapid method for deploying tags using small First Person View
(FPV) racing drones, which are modified to be waterproof and buoyant. With the tag secured
in a similar bistable clamp as used in pole tagging, the drone descends towards a whale and
performs a tap-and-go deployment on the dorsal side of the whale.
Recovery
Given the high-quality audio recording system of the CETI Tag that generates approximately
300MB of losslessly compressed data per hour, and the relatively short periods of time the tag
is above the surface while attached to a whale, data retrieval must occur after the tag releases
from the whale. This also aligns with the operation of previous sound-recording animal-borne
tags. This need to reliably retrieve the tag from the field motivated the implementation of two
recovery methods for the CETI Tag.
The first method, which has been a standard of animal-worn technologies for decades, uses
a standalone VHF beacon fish tracker (or “fish implant”) that is inserted in the rear floatation
syntactic foam and does not require electrical integration with the main tag. This device transmits
a pulse every second, which can be received by a directional antenna to infer a relative heading.
The second method uses GPS and involves the development of an expansion board attached to
the main tag PCB. This board is capable of recording GPS information during the mission (when
a signal is available), and transmitting GPS information to the field team for retrieval after the
tag has detached from the whale. Several land-to-land and land-to-space radio communication
technologies were explored for position estimation and transmission, but ultimately the Automatic
Packet Reporting System (APRS) was selected for use on the expansion board.
Data Offloading
Once the tag has been recovered, data can be accessed wirelessly.
After restarting the tag, it will automatically connect to a WiFi network named "CETI".
A local computer on the same network can then connect to the tag using its domain name
(see the software section for more details).
Audio and sensor data can then be copied from the "/data" folder.