The onboard computational capabilities and software architecture were designed to enable
synchronous multimodal streaming of audio and behavioral sensors, encourage rapid prototyping
for diverse research goals, ease usability during field deployments, and facilitate the curation of a
large-scale dataset of both tag data and external devices such as drones or gliders. Challenges include
limited computational resources of embedded devices, varied sampling rates across sensors,
operation without human supervision, uncertain internet connectivity during deployments, no
wireless connectivity underwater, possible intermittent power losses, and possible data corruption
via water damage.
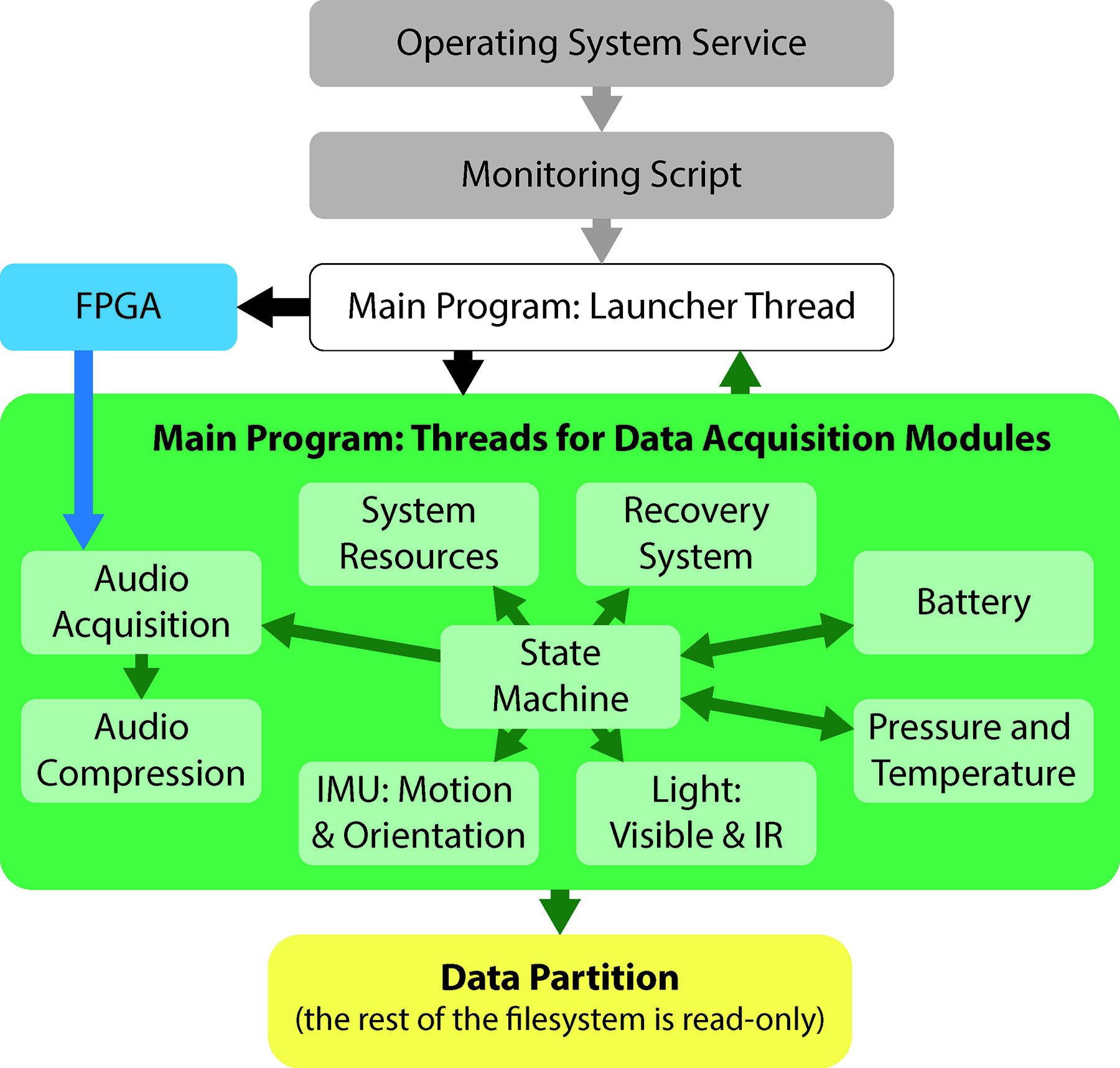
The software architecture aims to provide reliable synchronous sampling of multiple sensors,
adapt behavior throughout a deployment, and be robust in harsh conditions. It is arranged in a
modular framework as shown below.
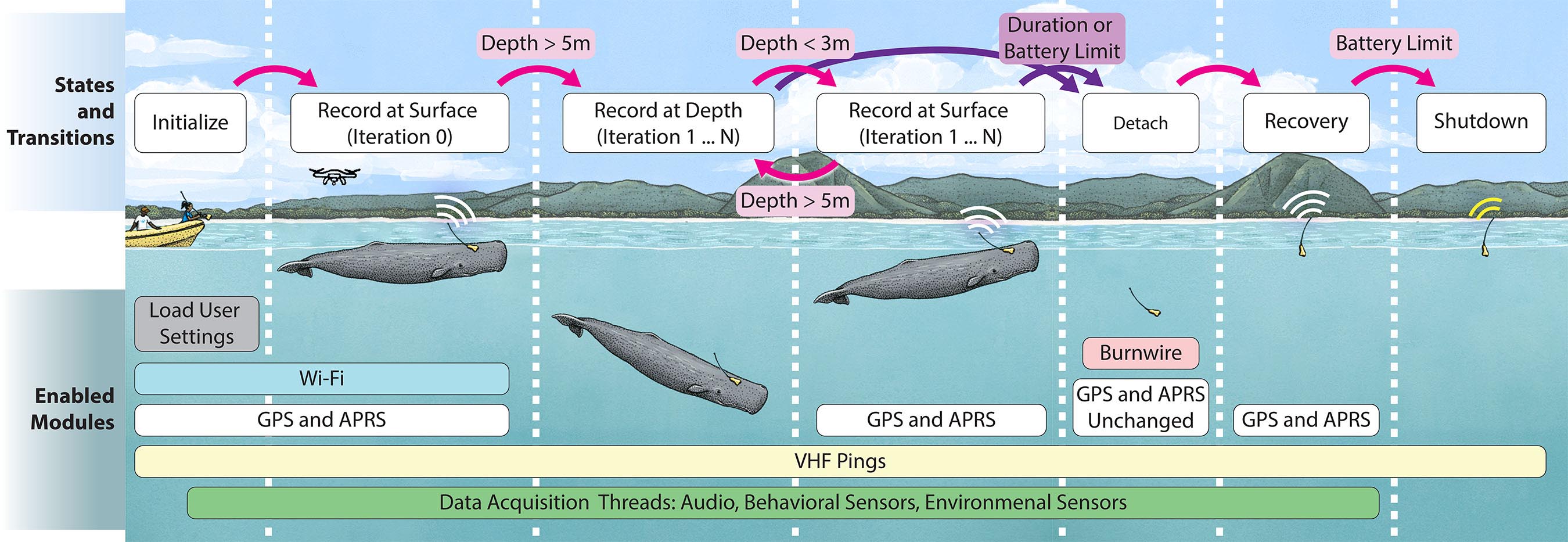
The central management system also features a state machine that adjusts the recording behavior based on inferred milestones throughout the deployment. The states and transition logic are visualized below.